Difference between revisions of "Msc2G7:Frontpage"
| Line 16: | Line 16: | ||
</div> | </div> | ||
</div><br> | </div><br> | ||
| − | [[File:Loop2.jpg]] | + | [[File:Loop2.jpg| 400px]] |
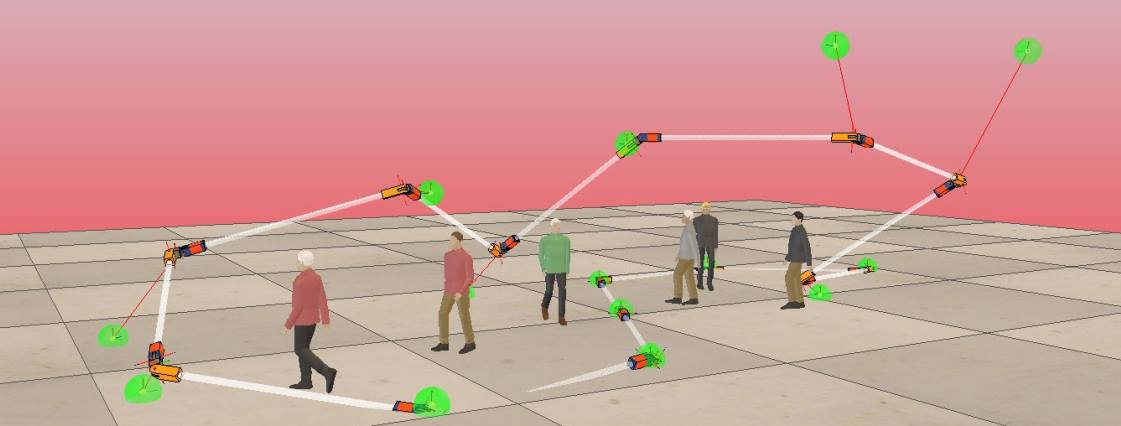
=='''The HyperLoop''' == | =='''The HyperLoop''' == | ||
Revision as of 11:50, 10 March 2015
Contents
[hide]The HyperLoop
Our objective is to design and create a working prototype of the Hyperloop. The project is divided in 2 parts and supposed to be carried out by 2 different groups, but since we're the only group assigned to the project we try our best to complete them both. The first part is Mechatronic Design and the second part is the System and Control.
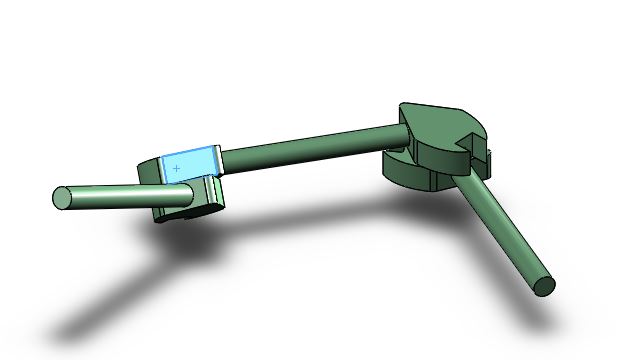
The Hyperloop - Mechatronics Design (Q3)
The first part contains of designing the hyperloop. The main focus lies on the design of the joint. After testing multiple prototypes we will create the ideal joint for our prototype. This will be the base on which we will build the system and control of the hyperloop.
The HyperLoop - System and Control (Q4)
The second part is the system and control and is divided in 3 parts. The first part will be controlling the motor with a (micro)computer using sensor input. The second part will be 2 joints communicating with each other using socket communication. At last we will design a consensus algorithm that makes the loop move while containing its loop shape.
Global Planning
| NAME | DUE | FINISHED AT |
| Prototype 1
Design Testing |
-
11/3 18/3 |
|
| Prototype 2
Design Testing |
-
20/3 27/3 |
|
| Final Prototype
Design (Testing |
-
01/4 20/4) |
|
| Control | 01/5 | |
| 2 (Micro)Computers Communicating with each other | 29/5 | |
| Consensus Algorithm | 05/6 |