Difference between revisions of "Msc2workshop:IndeSem"
Marco Galli (Talk | contribs) |
Marco Galli (Talk | contribs) |
||
| (17 intermediate revisions by 2 users not shown) | |||
| Line 7: | Line 7: | ||
[[File:Poster_Pre_Workshop.jpg | 850px]] | [[File:Poster_Pre_Workshop.jpg | 850px]] | ||
| − | '''Continuous Variation | Workshop, 1-5 June 2015 | led by the Robotic Building Team | Hyperbody, AE+T, TU Delft''' | + | <span style="font-size: 15px; color: #F98608;">'''Continuous Variation | Workshop, 1-5 June 2015 | led by the Robotic Building Team | Hyperbody, AE+T, TU Delft''' </span><br> |
The workshop focuses on applying design-to-robotic-production (D2RP) methods developed by the RB team to the design of an urban interface between the water and the building on the assigned site (Fenix Dock). Programmatic use of the urban interface will be defined in relationship to local urban analysis, global societal challenges, and D2P constraints with the aim to explore hybridity, variation, and componentiality at different scales, ranging from micro levels, as material systems, to macro levels as spatial and architectural configurations. | The workshop focuses on applying design-to-robotic-production (D2RP) methods developed by the RB team to the design of an urban interface between the water and the building on the assigned site (Fenix Dock). Programmatic use of the urban interface will be defined in relationship to local urban analysis, global societal challenges, and D2P constraints with the aim to explore hybridity, variation, and componentiality at different scales, ranging from micro levels, as material systems, to macro levels as spatial and architectural configurations. | ||
<div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;"> | <div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;"> | ||
| − | <div style="float:left; width: | + | <div style="float:left; width: 155px; height 30px; border: 1px solid #4C728B; background: #4C728B; margin-right:10px; " align="center"> |
[[Msc2workshop:IndeSem|'''MAIN''']] | [[Msc2workshop:IndeSem|'''MAIN''']] | ||
</div> | </div> | ||
| − | <div style="float:left; width: | + | <div style="float:left; width: 155px; height 30px; border: 1px solid #4C728B; background: #4C728B; margin-right:10px; " align="center"> |
[[project01:InDeSem|'''Hibridity''']] | [[project01:InDeSem|'''Hibridity''']] | ||
</div> | </div> | ||
| − | <div style="float:left; width: | + | <div style="float:left; width: 155px; height 30px; border: 1px solid #4C728B; background: #4C728B; margin-right:10px; " align="center"> |
[[project02:InDeSem|'''Variation''']] | [[project02:InDeSem|'''Variation''']] | ||
</div> | </div> | ||
| − | <div style="float:left; width: | + | <div style="float:left; width: 155px; height 30px; border: 1px solid #4C728B; background: #4C728B; margin-right:10px; " align="center"> |
[[project03:InDeSem|'''Componentiality''']] | [[project03:InDeSem|'''Componentiality''']] | ||
| + | </div> | ||
| + | <div style="float:left; width: 155px; height 30px; border: 1px solid #4C728B; background: #4C728B; margin-right:10px; " align="center"> | ||
| + | [[project04:InDeSem|'''Porosity''']] | ||
</div> | </div> | ||
</div><br> | </div><br> | ||
| Line 28: | Line 31: | ||
'''Coordinators:''' Henriette Bier, Sina Mostafavi | '''Coordinators:''' Henriette Bier, Sina Mostafavi | ||
'''Workshop Tutors:''' Henriette Bier, Sina Mostafavi, Ana Maria Anton, Serban Bodea, and Matteo Baldassari | '''Workshop Tutors:''' Henriette Bier, Sina Mostafavi, Ana Maria Anton, Serban Bodea, and Matteo Baldassari | ||
| − | Workshop Assistants: Marco Galli, Jeroen van Lith, Mohammad Jooshesh, Vasiliki Koliaki and MSc 2 D2RP students | + | '''Workshop Assistants''': Marco Galli, Jeroen van Lith, Mohammad Jooshesh, Vasiliki Koliaki and MSc 2 D2RP students |
''Workshop is supported by the Robotic Building group with one KUKA robot and by ABB and KUKA with two additional robots.'' | ''Workshop is supported by the Robotic Building group with one KUKA robot and by ABB and KUKA with two additional robots.'' | ||
| − | |||
| − | |||
---- | ---- | ||
| + | <span style="font-size: 15px; color: #F98608;">'''DOWNLOAD Workshop Brief >''' [[File:IDS-06.pdf]] </span><br> | ||
| + | ---- | ||
| + | |||
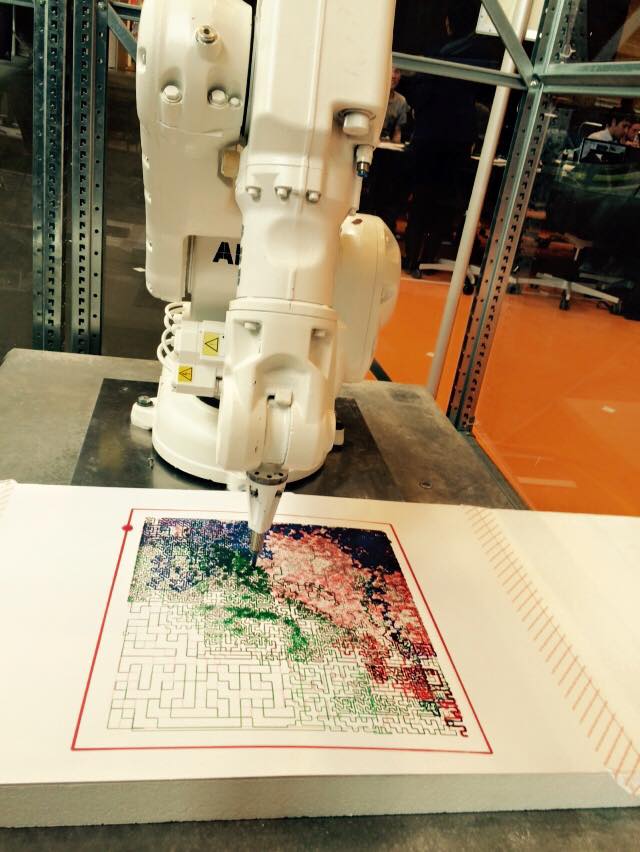
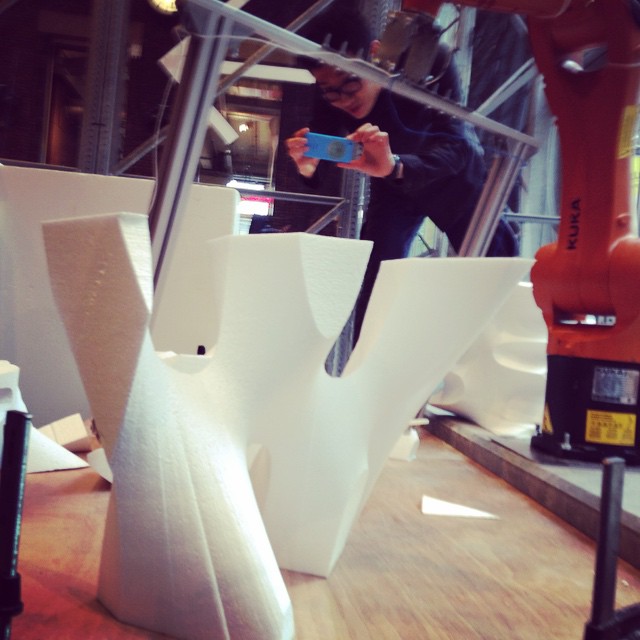
| + | =='''InDeSem 15 |''' ROBOTIC BUILDING WORKSHOP EXPERIENCE== | ||
| + | |||
| + | <gallery mode="packed"> | ||
| + | Image:ids1.jpg| | ||
| + | Image:ids2.jpg| | ||
| + | Image:ids3.jpg| | ||
| + | Image:ids4.jpg| | ||
| + | Image:ids5.jpg| | ||
| + | Image:ids7.jpg| | ||
| + | Image:ids8.jpg| | ||
| + | Image:ids9.jpg| | ||
| + | Image:ids10.jpg| | ||
| + | Image:ids11.jpg| | ||
| + | Image:ids12.jpg| | ||
| + | Image:ids13.jpg| | ||
| + | Image:ids14.jpg| | ||
| + | Image:ids15.jpg| | ||
| + | Image:ids16.jpg| | ||
| + | Image:ids17.jpg| | ||
| + | Image:ids18.jpg| | ||
| + | Image:ids_20.jpg| | ||
| + | Image:ids21.jpg| | ||
| + | Image:ids_22.jpg| | ||
| + | |||
| + | </gallery> | ||
| + | |||
| + | <div><html> | ||
| + | <iframe width="850" height="450" src="https://www.youtube.com/embed/PW1ywsudW14" frameborder="0" allowfullscreen></iframe> | ||
| + | </html> | ||
| + | |||
| + | |||
=='''InDeSem 15 |''' ROBOTIC BUILDING LECTURES== | =='''InDeSem 15 |''' ROBOTIC BUILDING LECTURES== | ||
Latest revision as of 12:37, 18 April 2016
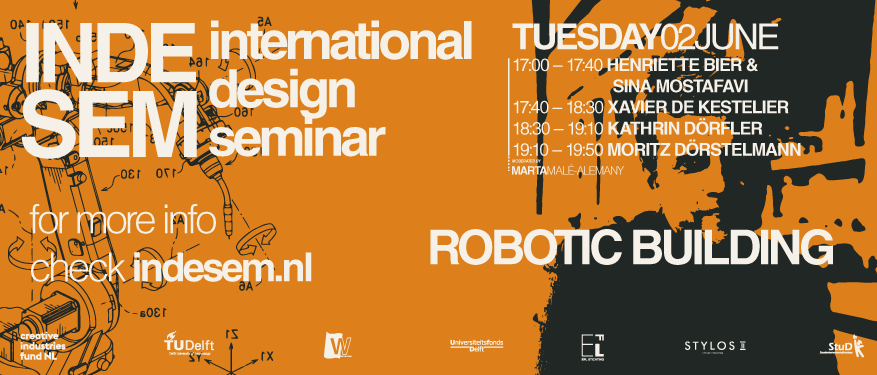
InDeSem 15 | DESING TO ROBOTIC PRODUCTION WORKSHOP
Continuous Variation | Workshop, 1-5 June 2015 | led by the Robotic Building Team | Hyperbody, AE+T, TU Delft
The workshop focuses on applying design-to-robotic-production (D2RP) methods developed by the RB team to the design of an urban interface between the water and the building on the assigned site (Fenix Dock). Programmatic use of the urban interface will be defined in relationship to local urban analysis, global societal challenges, and D2P constraints with the aim to explore hybridity, variation, and componentiality at different scales, ranging from micro levels, as material systems, to macro levels as spatial and architectural configurations.
Coordinators: Henriette Bier, Sina Mostafavi Workshop Tutors: Henriette Bier, Sina Mostafavi, Ana Maria Anton, Serban Bodea, and Matteo Baldassari Workshop Assistants: Marco Galli, Jeroen van Lith, Mohammad Jooshesh, Vasiliki Koliaki and MSc 2 D2RP students Workshop is supported by the Robotic Building group with one KUKA robot and by ABB and KUKA with two additional robots.
DOWNLOAD Workshop Brief > File:IDS-06.pdf
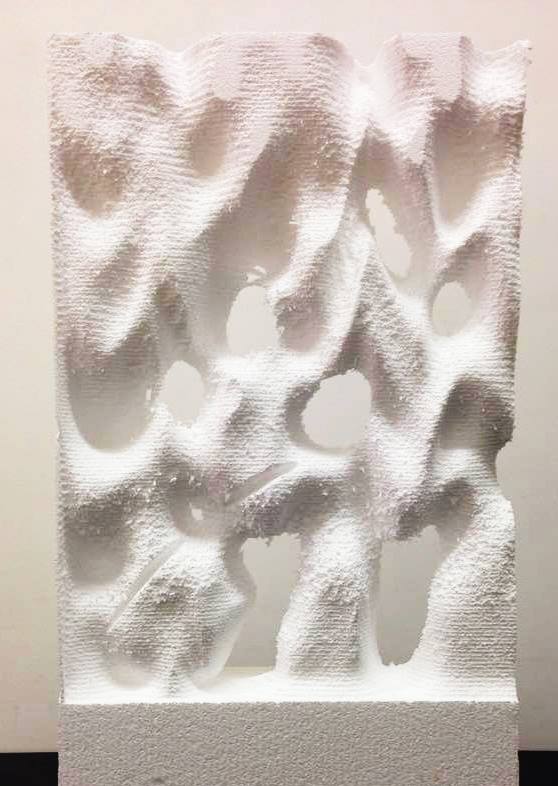
InDeSem 15 | ROBOTIC BUILDING WORKSHOP EXPERIENCE


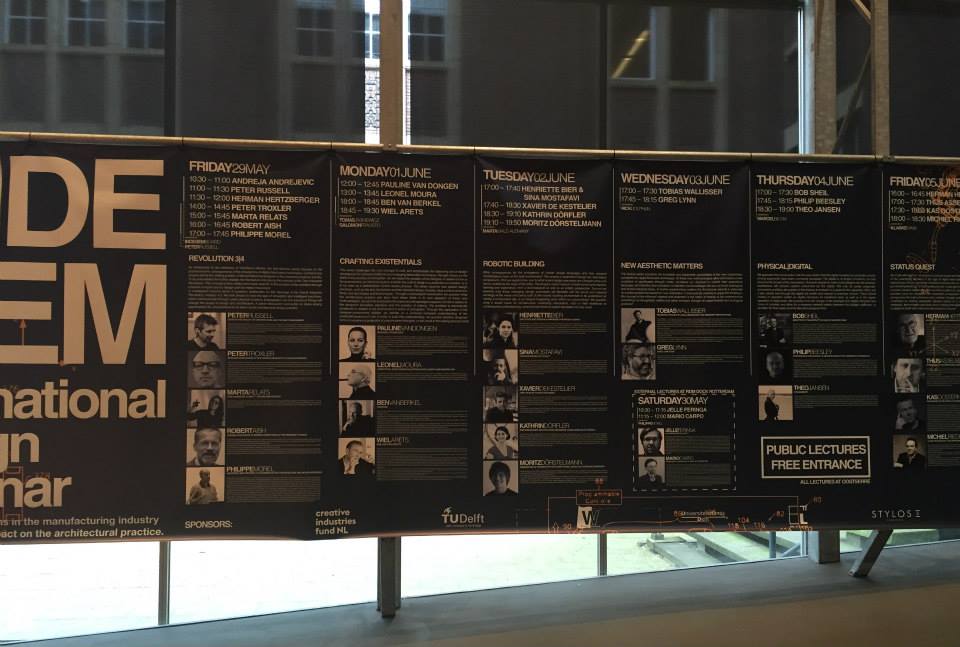













InDeSem 15 | ROBOTIC BUILDING LECTURES
InDeSem 15 | RESOURCES
Plug-ins List:
1- Weaverbird - http://www.giuliopiacentino.com/weaverbird/
2- Millipede - http://www.food4rhino.com
3- Kangaroo - http://www.food4rhino.com/project/kangaroo
4- Karamba GH (trial version) - http://www.karamba3d.com
5- Lady Bug - http://www.food4rhino.com
6- Anemone - http://www.food4rhino.com/project/anemone
7- Mesh edit - http://www.food4rhino.com/project/meshedittools
8- Mesh tools - http://www.grasshopper3d.com/group/milkbox/forum/topics/mesh-pipe-and-sweep-mesh