Difference between revisions of "Main Page"
| Line 8: | Line 8: | ||
[[File:rb_rd2p.jpg|420px]] | [[File:rb_rd2p.jpg|420px]] | ||
[[File:rb_iae.jpg|420px]] | [[File:rb_iae.jpg|420px]] | ||
| − | <div style="width: 400px; padding-right: | + | <div style="width: 400px; padding-right:23px; float: left"> |
| − | + | RD2P focuses on linking design to materialisation by integrating all functionalities (from structural strength, to thermal insulation and climate control) in the design of building components. This is implemented by employing novel multi-performative D2P strategies. New materials are developed for the robotic production of multi-material building components and novel robotic production and assembly tools are deployed for testing the blueprint of future robotic building. | |
</div> | </div> | ||
<div style="width: 400px; float: left"> | <div style="width: 400px; float: left"> | ||
| − | + | IAE will operate on the premise that bodily motion and non-verbal communication can be understood as interfaces of emotional expression and cognition. The idea of creating a proactive behavior loop between the body, the physical and ambient space it operates within as well as the tools and techniques offered by contemporary new media technologies shall be a central operational logic driving the studio. | |
</div> | </div> | ||
Revision as of 16:36, 11 February 2015
HYPERBODY Robotic Building | RB | Spring Semester 2015
TUTORS TEAM: Kas Oosterhuis, Henriette Bier, Nimish Biloria, Sina Mostafavi, Gary Chang, Veronika Laszlo
the MSc 2 project will address physically built robotic environments and robotically supported building processes with two groups of students, one focusing on numerically controlled (NC) and robotic design-to-production (D2P) processes and the other one on embedded sensor-actuator technologies.
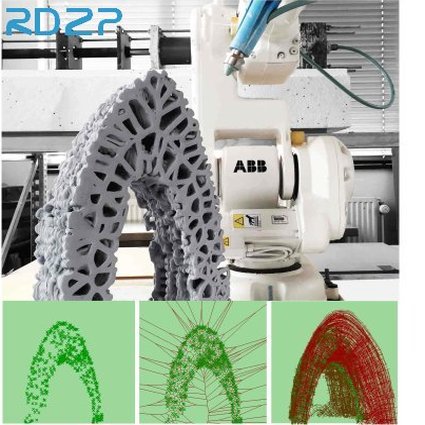

RD2P focuses on linking design to materialisation by integrating all functionalities (from structural strength, to thermal insulation and climate control) in the design of building components. This is implemented by employing novel multi-performative D2P strategies. New materials are developed for the robotic production of multi-material building components and novel robotic production and assembly tools are deployed for testing the blueprint of future robotic building.
IAE will operate on the premise that bodily motion and non-verbal communication can be understood as interfaces of emotional expression and cognition. The idea of creating a proactive behavior loop between the body, the physical and ambient space it operates within as well as the tools and techniques offered by contemporary new media technologies shall be a central operational logic driving the studio.